Attn: Mechanical Engineering Internship - Machina Labs
I was first introduced to Machina Labs through a little channel called Smarter Every Day. What I saw was a group of manufacturers that are completely and justifiably convinced that this technology is about to explode. What I saw was an application of mostly pre-existing technology in an extremely intelligent way.
One common tool stack shown on your mid-sized forming robots is a Kuka robot with an ATI Omega160 force/torque sensor, an ATI QC-160 tool changer with passthrough modules, and a forming end effector. Working at ATI’s design verification and applications development labs, I worked on this technology stack (except for Machina’s special tool), creating and running long-duration, high-force, and high-moment scenarios. Every day, I worked on creating tests for current and future innovative customers like yourself, but it was more like a playground. I got lost in creating workholding hardware and kinematic models in SolidWorks, sought out new challenges like creating a safety mechanism for moving heavy testing weights, and shared my developments with the world with performance certifications and video reports. The people of ATI have succeeded in their field because their breadth of engineering and interpersonal insight creates opportunities. I am seeing my breadth of experience bearing fruits in research.
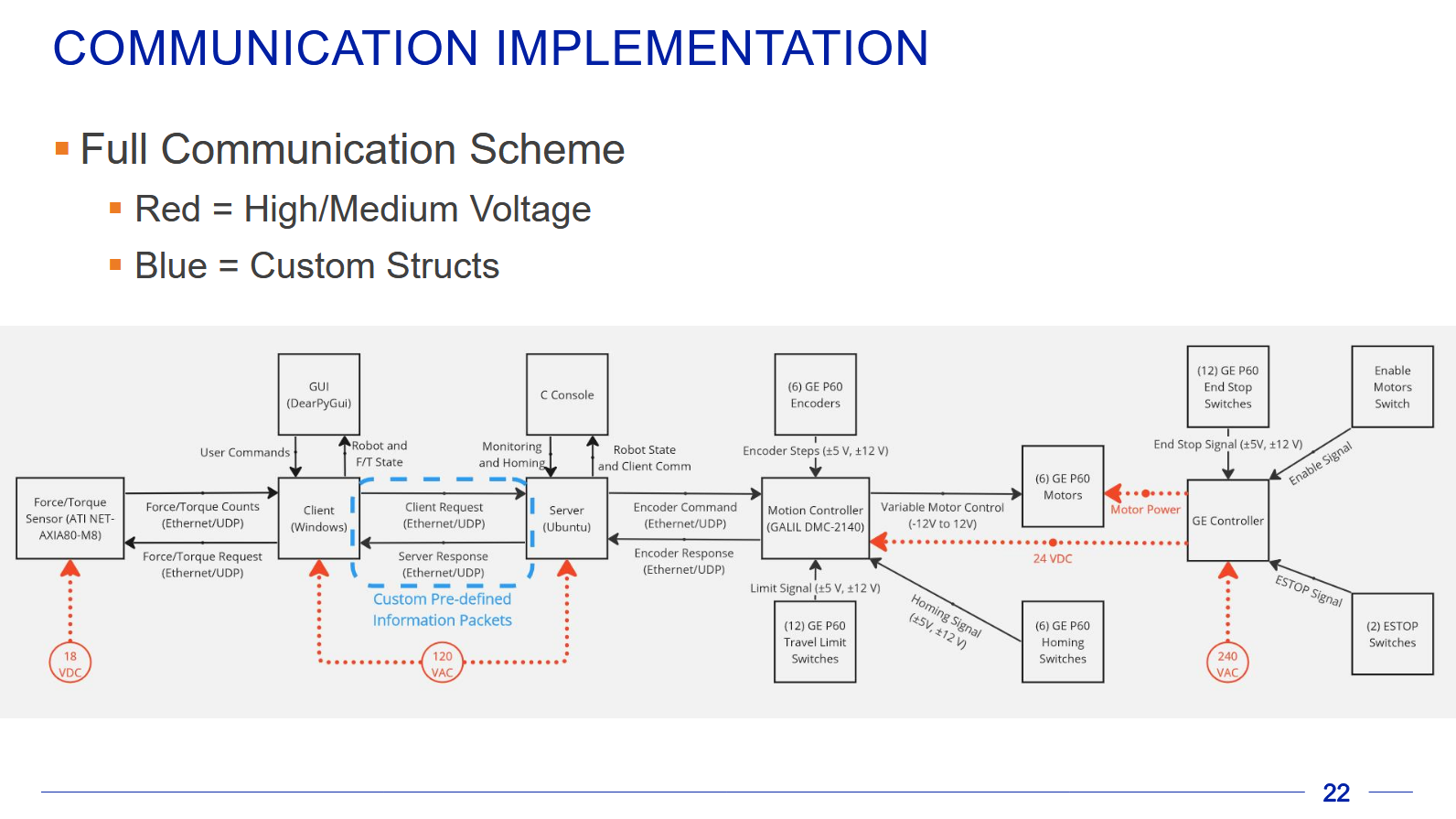
When I departed ATI, it did not leave me. I traveled home with an ATI Axia80-M8 force/torque sensor for use in my undergraduate honors research. I created a full experimental plan to get the current positional accuracy of a poorly performing robot by pushing on a flat plate. Sound familiar? In this project, I learned to not fear uncertainty, both emotionally and mathematically. I induced fewer uncertainties by designing my interface plates with GD&T specifications, adapting communication and safety standards, and by writing my own mechanism kinematic model in Python of which I knew the errors within. In the YouTube video, I saw Mark A. using a GUI to track the force/torque data over time, and this is exactly what I needed for my research. I looked closely at the interface and eventually found the open-source library it was based on, DearPyGui. I implemented my own version to handle safety and pose communication along with force, torque, position, and angle data logging. Finally, I shared the result with a community of robotic kinematics experts and the world with a presentation on my website, www.iterable.design/machinalabs.
I built this site to more easily display my engineering progression in today’s online world, and because it was hard to do. I learned how to shrink my ideas into a meaningful presentation with real consequences if I fail. Many of my projects use Python, SolidWorks, AutoCAD, MATLAB, and other digital designing tools which help me share passionately. The most fulfilling projects have been those that bring others joy.
I am a graduate researcher in a Nonlinear Control and Robotics group, an honors undergraduate with a thesis on robotic sensing and kinematics, and a project engineer of a robotic 3D printer student group. Coupled with instructional roles in Mechanical Design and Aeronautic Design capstone courses, I have developed a passion for academic, rigorous, and technical communication of the design process.
I, like you, am extremely excited about the future development of this group. Edward Mehr is an engineering-first leader who is guiding Machina into the future of highly competitive manufacturing, starting with roboforming. I want to be a part of this group wherever you see my experience and ability to adapt most useful, starting in the spring or summer of 2025.
I appreciate your consideration,
Joseph Hill
View my design showcase online at www.iterable.design/machinalabs















.png)













































.JPG)





