Honors Research
Robotics
Machining
Computers
Measuring End Pose, Force, an Torque for the Calibration of a 6R Mechanism.
Iteration 2
Spring 2024

GE P60 6R Arm. Staight out of 1980.

Forward and reverse kinematics by Crane and Duffy (1998) are greatly simplified by 3 parallel axes. Implemented in Python with linear algebra in Numpy math package.

ATI Axia80-M8 Force/Torque Sensor uses 13 silicon strain gauges to "feel" how the robot pushes. Mounted with 2 interface plates.
Communication, power, and safety scheme.
I made my own GUI based on DearPyGui, a performant (60 FPS), Windows-based Python library. It handled safety, robot commands, experiment progress, data display, and logging.

The system reliably detected deviations in the robot's position, up to an order of magnitude more variation than the known flat plate.
Development of Python applications with GUI to communicate and compute kinematics.
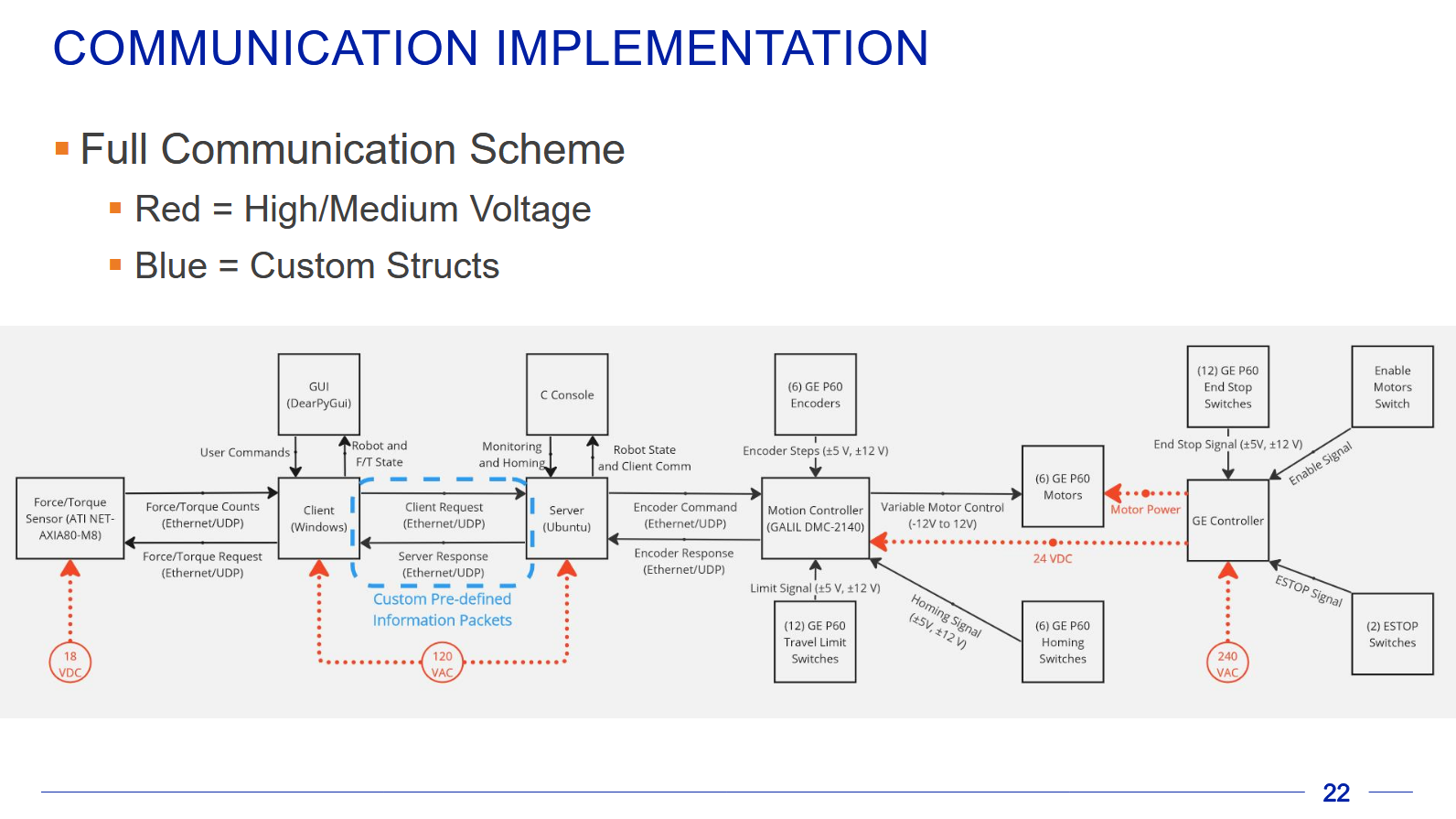
Custom UDP communication interface with legacy robot software.

Iteration 1
Summer 2023
Design, prototype, and manufacture of two aluminum interface plates.
Use of GD&T in part drawings for fittment.
Trained in the safe operation of experimental robots.